ISS robotic arm
Numéro d’image : 11888551
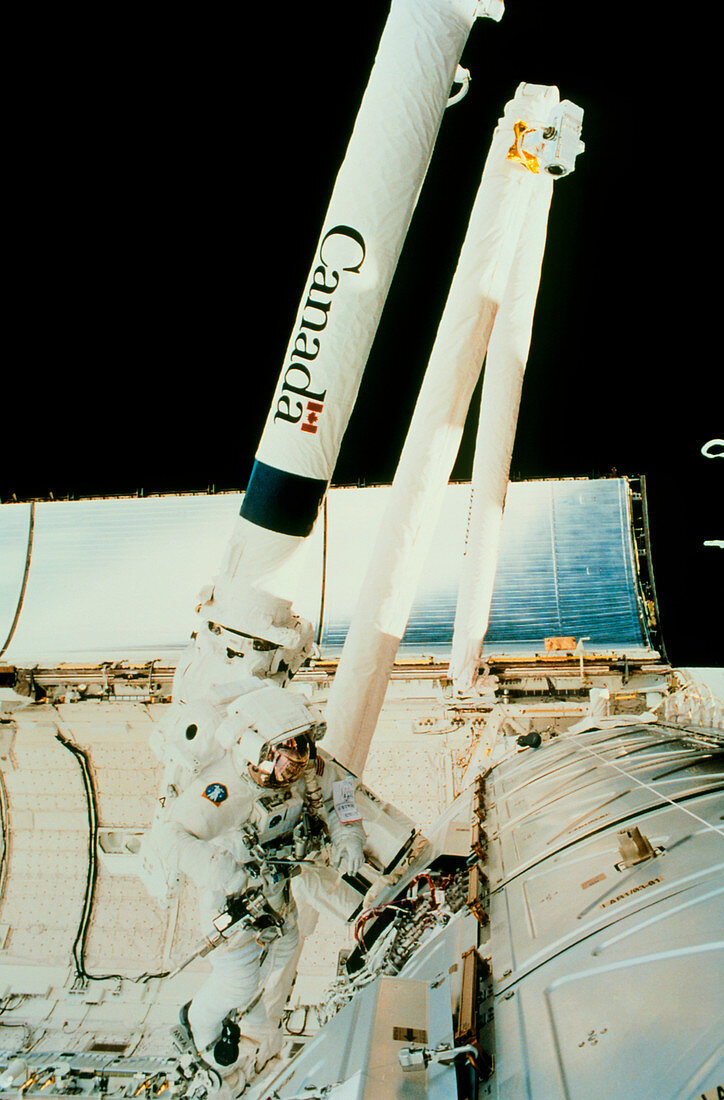
| ISS robotic arm. Astronaut Scott Parazynski with the 17.5-metre-long robotic arm (Canadarm2) of the International Space Station (ISS). He is attaching cables to the ISS Destiny laboratory module (lower right),on which Canadarm2 is mounted. Canadarm2,also called the Space Station Remote Manipulator System (SSRMS),will be used to manipulate cargos and new ISS modules. The Space Shuttle Endeavour flew this mission (STS-100 ,19 April-1 May 2001). The ISS is a joint effort between NASA,the European Space Agency,the Russian space agency,Canada,Japan and Brazil. It orbits at an altitude of 350 kilometres,has been manned since late 2000 and is scheduled for completion in 2004 | |
| Licence : | Droits gérés |
| Crédit: | Science Photo Library / NASA |
| Taille de l’image : | 2480 px × 3766 px |
| Model Release : | Non requis |
| Property Release : | Non requis |
| Restrictions : | - |
Prix pour cette image À partir de 45 €
Produit vendu
(Calendrier, Carte postale, Carte de vœux, Impression sur textile, Packaging etc)
À partir de 45 €
Usage commercial
(Affichage, Annonce presse, Annonce TV, Carte, Digital - hors rés. sociaux, Digital - rés. sociaux etc)
À partir de 45 €
Éditorial
(Digital, Journal, Livre, Livre pratique, Magazine, Télévision etc)
À partir de 60 €
Usage non-commercial
(Digital - hors rés. sociaux, Digital - rés. sociaux etc)
À partir de 120 €
Mots clés
- activité extra véhiculaire,
- américain,
- astronaute,
- bras de robot,
- bras robotique,
- bras robotisé,
- câble,
- câbles,
- Canadarm 2,
- combinaison spatiale,
- construction,
- destin,
- en orbite,
- Endeavour,
- grue,
- homme,
- installation,
- ISS,
- laboratoire,
- masculin,
- mission,
- module,
- N/A,
- orbital,
- orbite,
- panneau,
- promenade,
- robot,
- station spatiale internationale,
- sur orbite,
- système de service mobile,
- système de télémanipulateur,
- US,
- USA,
- vol spatial